

IHMC’s Nadia Is a Versatile Humanoid Teammate

The Florida Institute for Human & Machine Cognition (IHMC) is very well recognized in bipedal robotics circles for training really advanced humanoid robots to stroll. Due to the fact 2015, IHMC has been house to a Boston Dynamics Atlas (the DRC version) as perfectly as a NASA Valkyrie, and substantial development has been produced on advancing these platforms toward trusted mobility and manipulation. But essentially, we’re conversing about some incredibly aged hardware here. And there just are not a good deal of superior replacement possibilities (out there to scientists, in any case) when it arrives to humanoids with human-comparable power, speed, and versatility.
Many years in the past, IHMC determined that it was superior time to make its personal robot from scratch, and in 2019, we observed some extremely neat plastic concepts of Nadia—a humanoid made from the floor up to conduct practical tasks at human speed in human environments. After 16 (!) experimental plastic versions, Nadia is now a genuine robotic, and it presently seems to be really spectacular.
For a long time, we have been pushing up against the boundaries of the hardware with DRC Atlas and Valkyrie. We haven’t been equipped to absolutely take a look at the limitations of our software program and our controls. With Nadia, it’s the other way all-around, which is actually interesting from a exploration point of view.
—Robert Griffin, IHMC
Built to be basically the next era of the DRC Atlas and Valkyrie, Nadia is a lot quicker, additional adaptable, and sturdy sufficient to make an superb research system. It is a hybrid of electrical and hydraulic actuators: 7 levels-of-flexibility (DoF) electric powered arms and a 3 DoF electrical pelvis, coupled with a 2 DoF hydraulic torso and 5 DoF hydraulic legs. The hydraulics are built-in smart actuators, which we have covered in the previous. Nadia’s joints have been organized to increase assortment of motion, that means that it has a dense manipulation workspace in entrance of itself (in which it truly issues) as very well as hugely mobile legs. Carbon fiber shells masking most of the robotic allow for for secure call with the ecosystem.
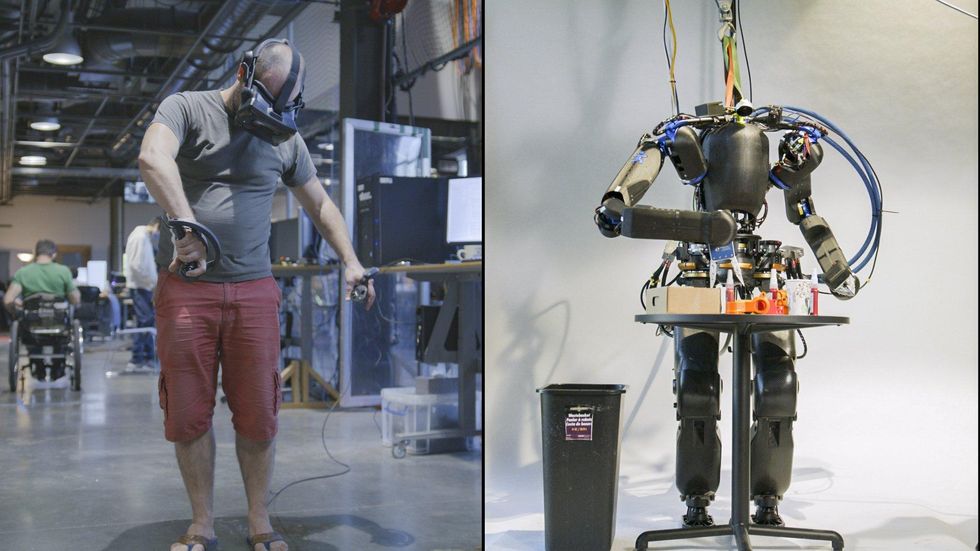
Teleoperation through immersive virtual truth helps Nadia conduct sophisticated responsibilities.IHMC
That massive manipulation workspace is specially suitable for the reason that there is a whole lot of emphasis on immersive virtual actuality teleoperation with Nadia. Not that autonomy is not vital, but the strategy guiding Nadia has been shaped (at minimum in part) by IHMC’s practical experience at the DARPA Robotics Problem Finals: Preferably, you want the robot to control everything it can on its own, though acquiring a human capable to consider far more direct manage more than elaborate duties. Even though it’s not the fantasy of a robotic staying fully autonomous, the actuality is that in the in the vicinity of phrase, this technique is an immediately practical way of obtaining robots to reliably do practical matters in unstructured environments. All round, the target with Nadia is to work as close to human speed as doable when executing city exploration and manipulation jobs. And if that will involve a human instantly teleoperating the robot since which is the most effective way of executing things, Nadia is created to manage it.
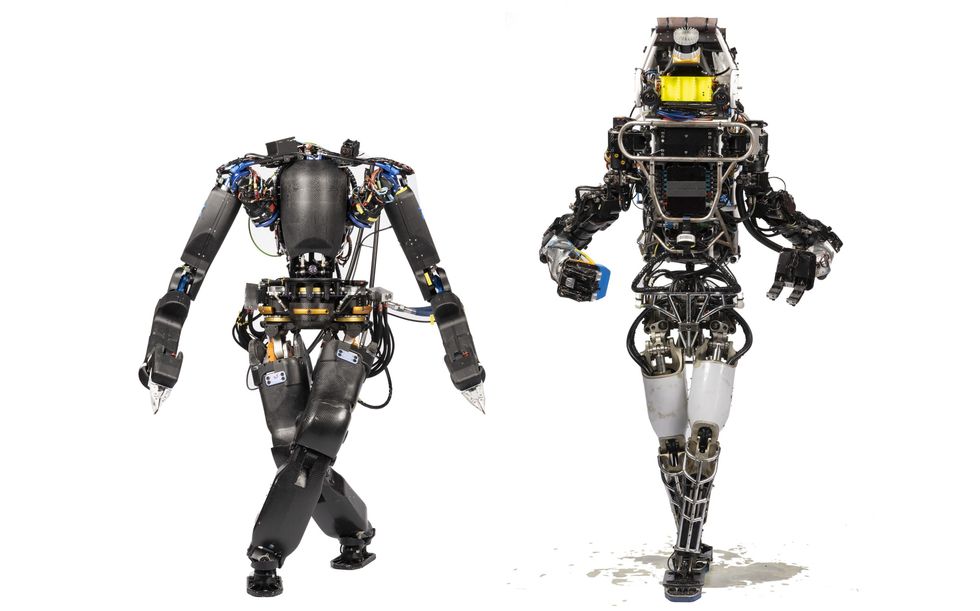
Nadia demonstrates how a lot extra adaptable its hips and legs are relative to DRC Atlas.IHMC
For far more facts about Nadia, we spoke with Robert Griffin, a analysis scientist at IHMC.
How is Nadia one of a kind amid humanoid robots?
Robert Griffin: I think the significant point that we’re attempting to carry to the desk with Nadia is the truly superior array of motion of a ton of the joints. And it’s not just the variety of movement that differentiates Nadia from lots of other humanoid robots out there, it is also velocity and electric power. Nadia has significantly greater electricity-to-bodyweight than the DRC Atlas, creating it significantly more quickly, which enhances its typical operational pace as well as its stability.
Can you place your goals with Nadia into context in the humanoid robotics area?
Griffin: We’re hoping to make Nadia a robotic that can perform in unstructured environments where you never know what it wants to do forward of time. So, as a substitute of having a established sequence or quantity of tasks, we’re trying to create up a robot in hardware, application, and interfaces that permit a human-equipment crew to go into an unidentified setting, discover it, map it, and then do significant duties.
IHMC has a reputation for supporting elaborate humanoid robots like DRC Atlas and Valkyrie with their mobility. How has all of that experience created its way into Nadia’s style and design?
Griffin: You’re appropriate, and we have been partnering with NASA JSC because the DRC—when you see Valkyrie walking now, it’s working with IHMC software and controllers. When it arrives to making use of some of that know-how to Nadia, we have paid particular awareness to points like Nadia’s assortment of motion in its legs. As opposed to a large amount of humanoid platforms, Nadia has really excellent hip roll (or ab/adduction), which signifies that it can do truly large steps and also genuinely slim ways in which the toes overlap just about every other. We think which is heading to enable raise mobility by helping with step adjustment and reaching challenging footholds.
Beyond the components, we ended up also in a position to use our simulation tools and control stack to really help us specify what the hardware layout essential to be in get to carry out some of these jobs. We weren’t capable to improve all of the joints on the robot—we very significantly trapped with a one hydraulic piston in the legs, for now, but we hope that our long run models will be better built-in and optimized. We do have total ankle actuation, compared with a lot of humanoid robots. Our strategy, from the beginning, was to appear for the important command authority with Nadia’s ft to be in a position to do exact foot placement, and use that for fairly rapid reactive mobility.
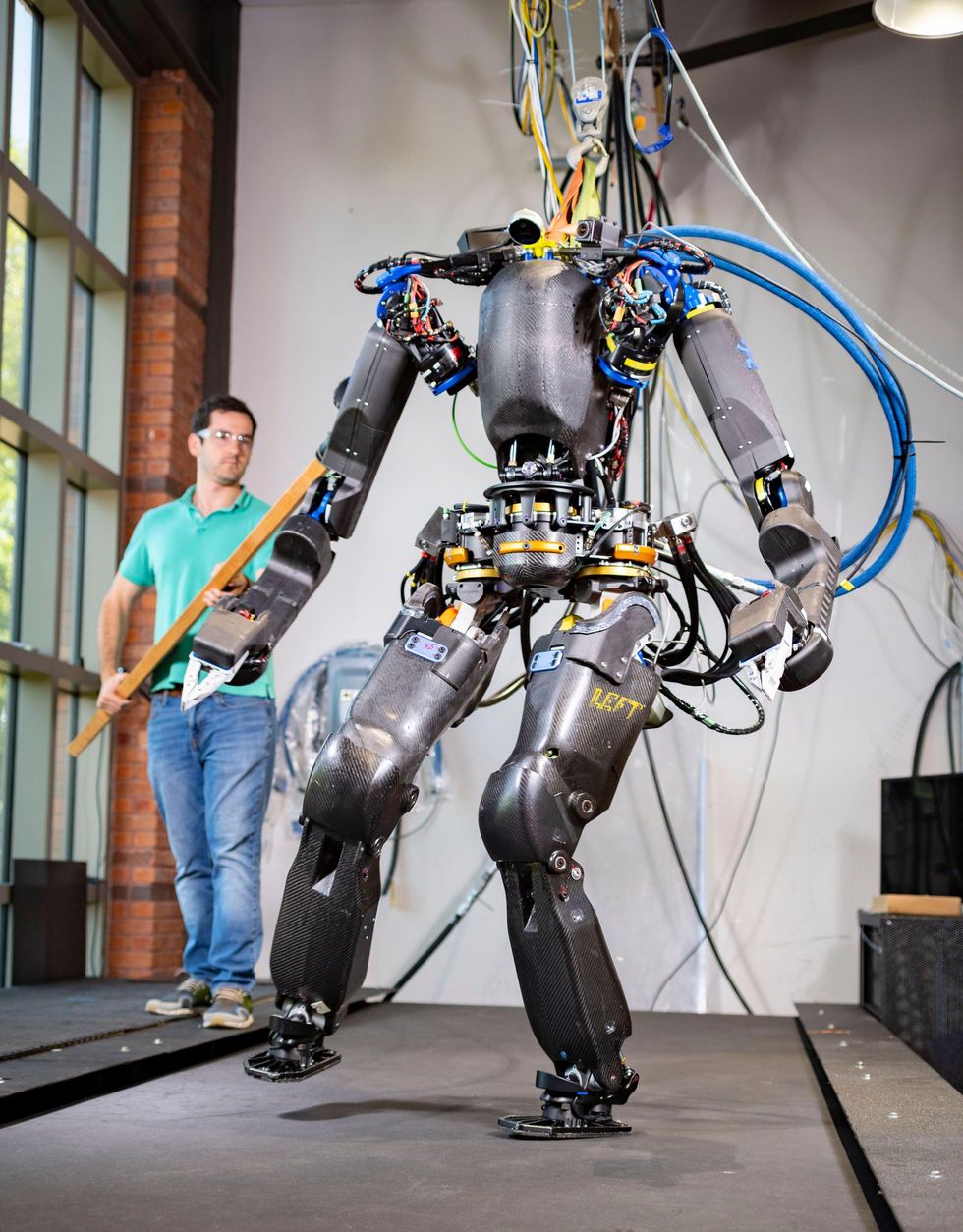
Robert Griffin presents Nadia a beneficial shove, for science.IHMC
As you went from principle to hardware with Nadia, what compromises did you have to make?
Griffin: We’re not really as flexible as a standard human, despite the fact that we’re not really considerably off. I was stunned that we dropped some vary of motion in the mechanisms just due to the fact of the hydraulic hose routing, especially all-around the hips, wherever we needed to keep away from having huge loops of hoses hanging off the robot. We sooner or later want to choose Nadia into the genuine world, and we don’t want the hoses having snagged on matters.
Nadia is not fairly as fast as a human in some of the joints, and in some of the joints it is a lot quicker. We’re also not really as compact as we needed to be at first, for the reason that, well, robots are truly difficult. We’re hoping to get it a small additional compact in the foreseeable future. And we skipped our excess weight margin by a little bit—it’s about 90 kilograms proper now, with no the hydraulic pump or battery on board.
Why did you come to a decision to focus on how a human can straight control Nadia in VR, as opposed to more emphasis on autonomy?
Griffin: Autonomy operates really, truly effectively when you know what the working situations are, and what you are seeking to attain. Not that it’s uncomplicated to automate that, but it is possible. We have experimented with some autonomous planning and manipulation, and we found that it’s a small limiting in that it doesn’t consider gain of the entire capabilities of our platform. And so what we’re seeking at carrying out is trying to automate just critical pieces of the system—things like footstep scheduling and grasp arranging, which can be automatic pretty effectively. But we also want the ability to interact with novel environments, which is why we’re concentrating on acquiring ways to team with humans as a result of interfaces like digital fact. With the cognitive capabilities of a human put together with the manipulation abilities of the robot, we believe you get a ton of versatility.
How significantly of a variation has it manufactured to controlling Nadia in VR, that the components has humanlike adaptability and a humanlike workspace?
Griffin: For manipulation, it’s been massive. We really don’t want the consumer to be working the robot and sensation like they are constrained in what they can do for the reason that of the robot’s constraints. A ton of the manipulation that we have been ready to do with Nadia we could hardly ever have completed with our other platforms.
There are definitely trade-offs—the arms are a lot more made for pace than for energy, which is heading to be a tiny little bit limiting, but we’re hoping to boost that very long-term. I assume that building the robot—and specifically the handle procedure and software program architecture—with the notion of possessing a human operating it has opened up a great deal of ability that we hope will allow us fast iterate alongside numerous distinctive paths.
What are some points that Nadia will be uniquely able of?
Griffin: We’re hoping that the robotic will be uniquely capable of multicontact locomotion—that’s a way that we’re seriously hoping to shift in, the place we’re not just relying on our ft to go by the earth. But I don’t essentially want to say that it’ll be better at that than other robots are, simply because I never know anything that other robots can do.
Are there simple responsibilities that you hope Nadia will be capable to do at some place in the potential?
Griffin: Points like catastrophe response, nuclear remediation, bomb disposal—these duties are largely carried out by persons right now, since we never have robots that are really capable of accomplishing them adequately in spite of the quantity of time that roboticists have been performing on it. I consider that by partnering superb robotic engineering with definitely incredible working interfaces and human cognition, these jobs will start out to grow to be feasible to do by a robotic.
Who requirements a real head when you have googly eyes and a shark mouth?IHMC
Even while Nadia is model new, IHMC by now has a bunch of upgrades planned for the robot. The most clear a single is reducing that tether by placing batteries and a custom hydraulic pump into Nadia’s torso. Also on the highway map are better torque arms and lighter, a lot more streamlined legs. In the meantime, the computer software has a good deal of catching up to do to make it possible for Nadia to achieve its full prospective. And if we know IHMC, which is heading to be an exceptionally exciting factor to see.